پایگاه خبری – تحلیلی دریایی ایران مارین نیوز رسانه ای دریایی، مستقل و بدون وابستگی به جریانهای خاص سیاسی است که در چهارچوب قوانین جمهوری اسلامی ایران سعی در اطلاع رسانی دقیق، سریع و شفاف به جامعه دریایی کشور را دارد.




۱۰ ارديبهشت ۱۴۰۳ - ۲۲: ۱۳: ۲۱

تازه های سایت
پربحث ترین اخبار
پربازدید ترین اخبار


سکوهای بدون سرنشین و متحرک های زیرسطحی راه های جدیدی را برای دانشمندان اقیانوس شناسی فراهم کرده اند تا اقیانوس را با جزئیات بیشتر و در دوره های طولانی تری مطالعه کنند و استفاده از این وسایل هزینه و مخاطرات کمتری در پی دارد.
به گزارش مارین نیوز، مزایای استفاده از سیستم های بدون سرنشین که سیستم های دیگر را با خود حمل کرده و به کار می گیرند، به ویژه در اقیانوس های وسیع، بسیار زیاد است و منحصر به یک ویژگی خاص نمی شود. استقرار یک گلایدر (در عمق1000 متری دریا) با استفاده از یک متحرک سطحی بدون سرنشین (USV) به این معنی است که می توان داده های مورد نیاز را در مدت زمان طولانی در مکان های دور و بدون نیاز به حضور کشتی تحقیقاتی و خدمه آن برای استقرار هر یک از سیستم ها جمع آوری کرد. بنابراین با استفاده از این سیستم های بدون سرنشین، در زمینه به کارگیری نیرو، صرف وقت و هزینه به شدت صرفه جویی می شود. اما اگر قرار باشد چنین سیستمی در عرض های جغرافیایی بالا، به عنوان مثال قطب جنوب نیز مورد استفاده قرار گیرد، چه اتفاقی رخ خواهد داد؟ دانشگاه های East Anglia (UEA) و Exeter (UoE) و سازنده متحرک موج رونده سطحی بدون سرنشین AutoNaut و سایر شرکای دانشگاهی با تعریف تعدادی پروژه مرتبط در این زمینه در حال برطرف سازی این چالش هستند. این نوع فناوری فرصت های زیادی را برای صنعت دریایی فراهم می کند. بدین معنی که برای جمع آوری اطلاعات می توان بدون نیاز به استقرار کشتی در محل، گلایدرها یا متحرک دیگر را در وسط اقیانوس مستقر کرد. با استفاده از این وسایل، کارآمدی افزایش یافته و تصمیم گیری اپراتور برای فرستادن متحرک در زمان مشخص، قابل توسعه است. AutoNaut به عنوان یک متحرک می تواند در یک محل سکونت گزیند و منتظر یک سونامی، موج یا باران بهاری باشد. همچنین می تواند در مکان هایی که برای کشتی های سرنشین دار بسیار خطرناک است (علی الخصوص در قطب جنوب)، مستقر شود.
گلایدرها با نیروی بویانسی حرکت کرده و از توان کمی استفاده می کنند، جزو متحرک با استقامت طولانی در اقیانوس محسوب شده و برای جمع آوری داده های اقیانوسی گزینه بسیار مناسبی هستند. اما چون سرعت زیادی ندارند، برای رسیدن به یک موقعیت مورد نظر به زمان بیشتری نیاز دارند. همچنین ممکن است هنگام رسیدن به موقعیت مشخص زیر امواج باشد، درنتیجه نمیتوانند داده های هواشناسی را نیز جمع آوری کنند. به آب اندازی آن ها از ساحل دشوار است، زیرا آنها به مقدار مشخصی عمق نیاز دارند تا بتوانند در حرکت نوسانی خود به جلو حرکت کنند. AutoNaut می تواند سریع تر (با سرعت حداکثر 3 گره) به منطقه مورد نظر برای استقرار SeaGlider و یا جمع آوری داده های سطحی حرکت کند. اتصال SeaGlider به AutoNaut یک چالش مکانیکی بود که توسط Alastair Nichol، مهندس مکانیک ارشد در AutoNaut رهبری می شد. طبق نظر متخصصان، اتصال آنها باید تا حد امکان مقاوم، قوی و ضد رسوبات زیستی دریایی باشد. ایده هایی مانند حمل SeaGlider در بالای AutoNaut و یا بکسل کردن آن کنار گذاشته شد. در عوض، راهی برای اتصال آن در زیر بدنه، قسمت وسط به سمت عقب، به منظور عدم تداخل با نیروی محرکه موجی AutoNaut (که تا حدی به بالا و پایین شدن سینه متحرک متکی است) در نظر گرفته شد و مکانیزم رهاسازی آن توسط اپراتور از راه دور که از طریق ماهواره با وسیله در ارتباط است فعال می شود. نتیجه یک گیره لولایی دایره ای فولادی ضد زنگ است که از طریق یک محرک خطی شل می شود و یک فنر آزاد می کند و میله ای را فشار می دهد (تنها قسمتی که به بدنه نفوذ میکند) و گیره را به اندازه ای باز می کند که SeaGlider خارج شود. بالک پاشنه SeaGlider به شکافی در مخروط پاشنه ی AutoNaut فرو رفته و از حرکت آن در حین حمل و نقل جلوگیری می کند. از آنجایی که معمولاً سکان تکی AutoNauts در حضور گلایدر کارایی خود را از دست می دهد، باید آرایش سکان جدیدی طراحی می شد. سپس، برای جلوگیری از رها شدن ناگهانی SeaGlider هنگام رها سازی و آسیب رسیدن به حسگرهای آن، دماغه آن در یک مسیر مستقیم در امتداد طول بدنه AutoNaut هدایت می شود تا زمانی که به اندازه کافی از بدنه AutoNaut فاصله گرفته و امکان حرکت بیشتر را داشته باشد.

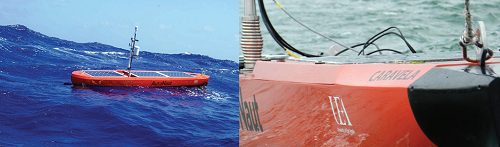
در اوایل سال 2020، این طرح مورد آزمایش قرار گرفت. AutoNaut USV به نام Caravela، که برای حمل و سپس استقرار Hydroid SeaGlider، با نام Humpback در نظر گرفته شده بود، از سواحل باربادوس به عنوان بخشی از پروژه چند سکوی EUREC4A به آب اندازی شد. Caravela به دریا رفت و سپس Humpback را مستقر کرد و قبل از بازگشت به ساحل 35روز در آب بود و SeaGlider بعداً توسط یک کشتی بازیابی شد. پس از استقرار موفقیت آمیز Caravela و Humpback در باربادوس، اکنون تمرکز بر روی استقرار این سیستم در عرض های جغرافیایی بالا، در مناطقی از جمله Roaring Forties و Furious Fifties است که مجموعه ای کاملاً جدید از چالش ها، شامل یخ زدن اجزای متحرک و ضربه زدن به یخ برای رسیدن به عمق کافی را درپی دارد. انرژی برای ادامه به کارگیری ابزارهای داخل وسیله، زمانی که هوا ابری است و نور خورشید به پنل های خورشیدی نمی رسد، چالش دیگری می باشد. عملیات در عرض های جغرافیایی بالا خلا داده های در دسترس از اقیانوس جنوبی و قطب شمال، به ویژه در زمستان را پر می کند.


ارسال نظر